MP有限状态自动机和AC自动机
什么是有限状态自动机?
定义n个不同状态,记为{1,2…n},在状态i时输入s,达到状态j,记为goto(i,s)=j
对于字符串s而言,在一个状态i下输入一个字符ch,也会达到一个指定状态 :
假定新的状态为串s[1,i]+ch的最长相等前后缀 ,便能够用这个状态机模拟KMP算法匹配字符串的过程。
当字符集仅为a、b时,有: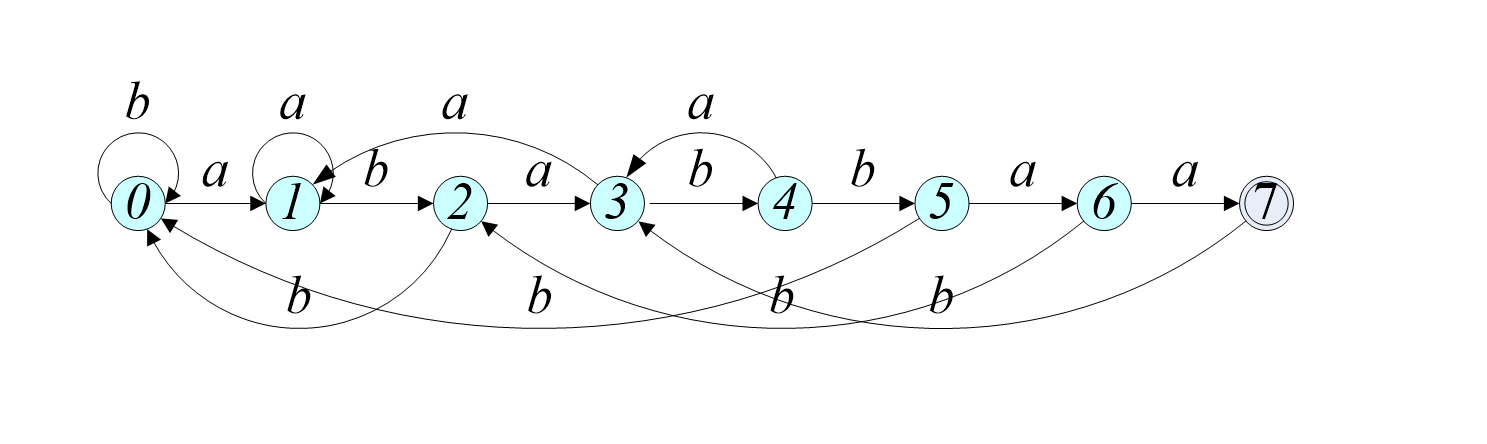
其中goto(4,a)=3,也就是说abab+a的最长相等前后缀 对应的状态是状态3 ,也即表示字符串“aba”的状态。
似乎这样就足够了。
我们获得了goto函数,定义为:
goto(Si,a):串s[1,i]a的最长相等前后缀。
为了得到这个goto函数的值,我们需要定义fail函数:
fail(Si):串s[1,i]的最长相等前后缀。
因为得到goto(i,a)的前提是,知道s[1,i]的最长相等前后缀s\[1,j] :若s[j+1]与a相同,则goto(i,a)=j+1,否则求s[1,j]的最长相等前后缀,直到长度为0。
为了表示“s[j+1]与a相同”这一条件,定义函数:
follow(Si, a):状态Si输入a后,来到下一个状态。
对于字符串abcde,follow(0,a)=1,follow(1,b)=2,follow(2,c)=3…以此类推,而其他值未定义。
到这里,goto函数就可表示为:
1 | state go_to(state s,char ch){ |
若s为模式串的状态,ch为s的后继字符,则这一goto值可当做新的fail值。
未定义状态,比如follow(0,b),计为0可不可行?
与之配套地,fail(0),计为0,也就是说空串的最长相等前后缀长度 为0。
若fail(0)记为-1,则follow(s==-1,ch)将陷入故障状态:没有状态被记为-1。
问题出现了!函数不得不进入死循环:因为s一直为0。
破环方式也很简单:
引入状态-1,未定义状态记为-1,fail(0)=-1,follow(-1,任何字符)=0。
这样,当计算ab+c的最长相等前后缀 时,便能够得到go_to(2,c)=0。
类似地,计算fail的函数为:
1 | Compute_fail() |
goto和fail数组的关系:fail反映模式串中的某部分字符串的最长相等前后缀 ,goto反映文本串和模式串的匹配情况。诚然,fail数组可以通过goto函数得到,但记录一些中间状态有利于加速算法。
匹配函数为:
1 | Match(t) |
我们都知道mp的c++写法。
基于以上定义,我们艰难地知道mp的有限状态自动机写法:
1 |
|
洛谷提交情况如下: 洛谷
这是一种没有任何实战意义的写法。
需要注意俩点:
if(edge[s][ch-‘A’]==s+1) return s+1;
只有计算fail函数时,遍历过某个字符时,才连一条edge边。
也就是说,在未遍历时,字符串abc的follow(0,a)=-1,follow(1,b)=-1,follow(1,c)=-1,而当遍历过b时,follow(0,a)=1,follow(1,b)=2,follow(1,c)=-1。这样做的原因是,若模式串天然有follow边,则fail数组的值会依次为-1,1,2,3,4…
if(fail[s_]!=-1&&P[s_+1]-‘A’==P[i+1]-‘A’){
fail[state(i)]=fail[s_]; }
这是knuth优化。对于字符串aaaa,mp的fail数组是0,1,2,3而kmp的fail数组是0,0,0,3。
因为kmp的fail数组不能很好地反映字符串的前后缀的关系,而我们通常需要利用这种关系,故现常用mp,且把mp称为kmp。
MP算法是一个O(m+n)的算法,证明如下:
1.在check函数中,对文本串扫描一遍,无回头扫描,消耗O(n)
2.自动机向右的移动距离 >= 向左移动的距离>=调用fail的次数,而向右的移动距离= 对文本串扫描的距离=n,故调用fail的次数=O(n)
3.构造fail数组时,向右的移动距离= 对模式串扫描的距离=m,即Fail构造复杂度的复杂度为O(m)
综合为O(m+n)。实际上,除了aaab匹配aaaaaaaa这种极端数据外,mp和暴力算法复杂度接近:随机情况下,暴力的复杂度也接近O(m+n),在数据随机生成的情况下,暴力匹配也基本很快就会失配。
虽然MP有限状态自动机看起来多此一举,但可以很便捷地理解AC自动机。
AC自动机要完成以下任务,对于一系列字符串t1,t2,t3,判断他们在文本串s中是否出现。
当然,可以跑3次mp算法,但这太过于漫长。
AC自动机需要利用字典树 字典树。
建树如下:
1 | void build(int noww){ |
当我们建立好字典树时,也需要fail数组的值:
注意:AC自动机的fail数组,其前缀和后缀未必出现在同一模式串上。如: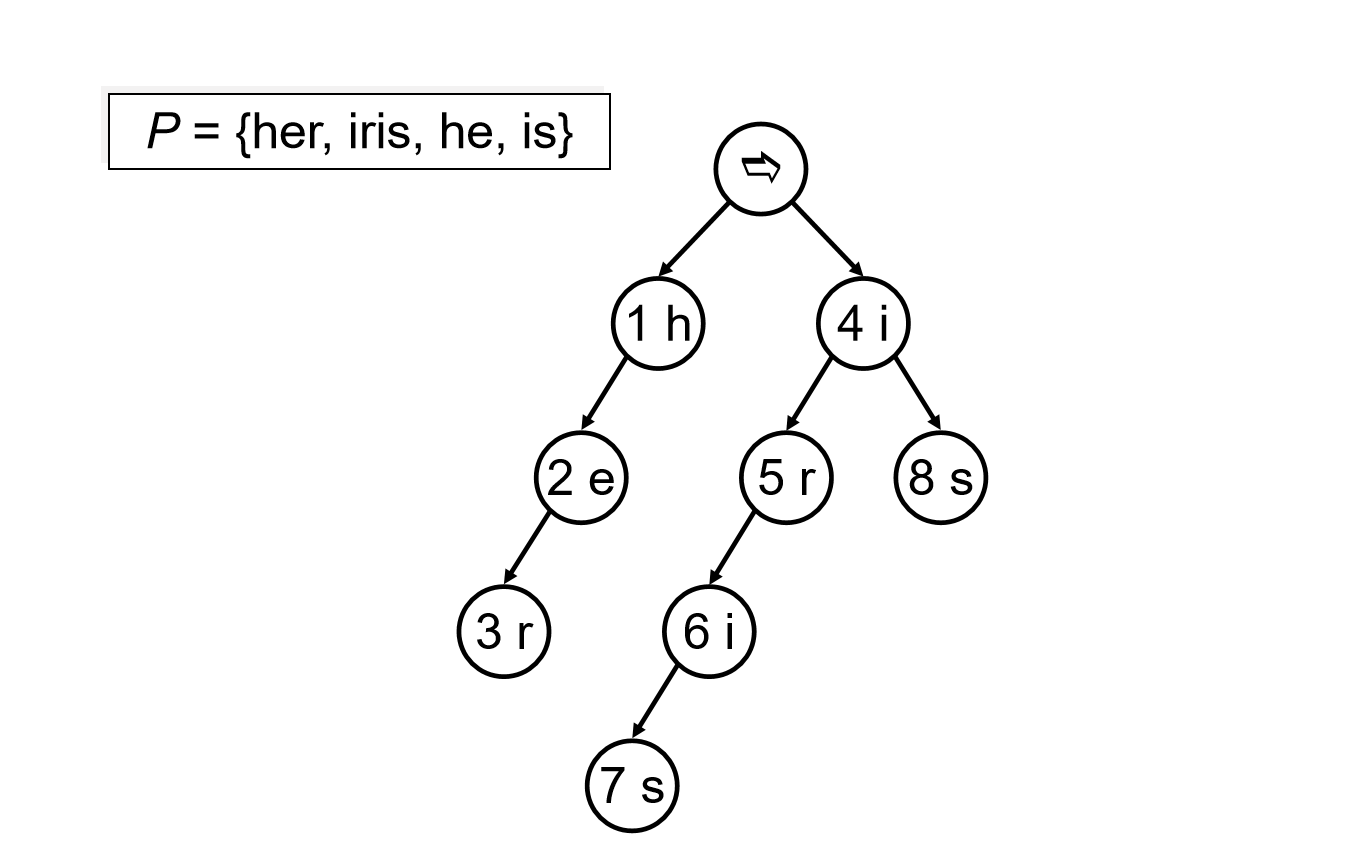
fail(7)=8,虽然6来自单词iris,4来自单词is。这样做的目的是,当匹配到iris时,也能匹配到可能的模式串is。
这就需要我们打一个标记,来记录“is”是不是模式串。
和上面同样的问题,计算fail就需要利用之前的fail值:
1 | void get_fail(){ |
模式匹配自动机带来的优化:
当文本串是“irisis”时,因为AC_[7].fail=8,goto(8,i)=0,follow(0,i)=4,故新的状态为4。
否则,计算goto(8,i)=0,再计算goto(0,i)=4,就需要经过不止两次goto,而非固定的一次goto。
时间复杂度分析:
AC自动机构造算法时间复杂为 O(|P|),|P|模式集合中模式的长度之和
模式匹配搜索时间复杂 O(n + occ),occ为模式出现次数(因为状态需要通过fail函数跳跃)
问题:T=aaaaaaaa,P={a,aa,aaa,aaaa,aaaa}时,搜索复杂度是多少?
check函数如下:
1 | int check(){ |
优化:
使用拓扑排序,不进行fail跳跃(以下check是统计出现了几次,上面check是统计出现了几种):
1 | void topu(){ |
设n为文本长度,k是模式数量,则:
最好匹配次数为n
最坏匹配次数为(1+n)*n/2+n²-nk
AC自动机
比特并行:一个机器字操作,能对所有比特进行改变。
非确定自动机NFA
MP的非确定自动机:
同一时刻,不只有最长的前缀被匹配,更短的前缀也同时被匹配。
在DFA中,活跃状态只有一个,其他状态通过“后缀链”连接;而NFA中,他们都是活跃状态(空前缀永远是匹配的;每次匹配,都能得到一系列活跃状态的集合(用机器字代表这些集合,机器字的每一个比特代表一个前缀是否匹配))。
NFA中没有必要有后缀链存在,而是只存在向前的链接。
举例:shift-and算法
文本串为ababb,模式串为abab,则状态变化为:
| 轮次\前缀 | a | ab | aba | abab |
|---|---|---|---|---|
| 初始D表 | 0 | 0 | 0 | 0 |
| 输入a后D表 | 1 | 0 | 0 | 0 |
| 输入b后D表 | 0 | 1 | 0 | 0 |
| 输入a后D表 | 1 | 0 | 1 | 0 |
| 输入b后D表 | 0 | 1 | 0 | 1 |
| 输入b后D表 | 0 | 0 | 0 | 0 |
形式化:设B[a]表示a在模式串存在的位置,即{1,0,1,0},B[b]表示b在模式串存在的位置,即{0,1,0,1},每次变化计为:
第一次移位得到可能活跃的集合,第二次取交得到活跃的集合。
shift-or:以0代表匹配,1代表不匹配。B[a]表示a不在模式串存在的位置,即{0,1,0,1},B[b]表示b在模式串存在的位置,即{1,0,1,0}(D向量初始全1):
扩展
比特并行算法能很好地处理通配符匹配问题:
1 |
|
比较
NFA需要硬件支持并行机制,空间占用小;
DFA只需要串行操作,空间占用大。
参考资料:
1.kmp和mp
.webp)